
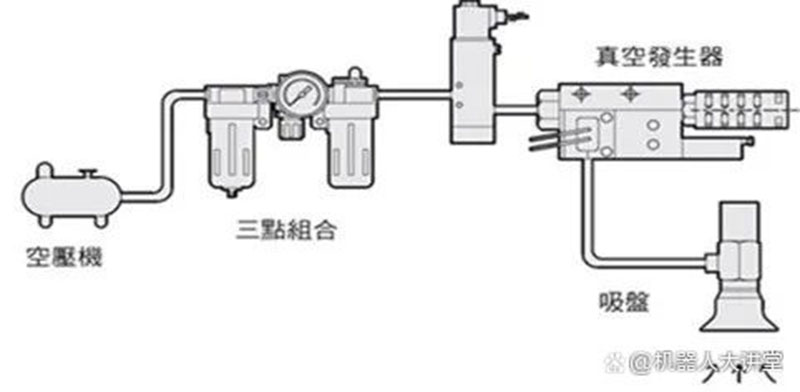
Từ góc độ cấu trúc chức năng, việc thực hiện máy tạo chân không chủ yếu là van điều khiển điện từ để điều khiển máy tạo chân không nhằm thực hiện việc tạo và dừng áp suất âm, để đạt được chức năng thu hút và giải phóng phôi.
Do đó, hệ thống thường bao gồm các thành phần sau: 1. Nguồn khí nén;2. Lọc;3. Chuyển van điện từ;4. Thiết bị truyền động chân không;5. Cốc hút cuối, túi khí, v.v. (Cấu trúc điển hình được thể hiện trong hình bên dưới).
Ngoài ra, theo yêu cầu của tự động hóa công nghiệp, để thực hiện việc giám sát quá trình hấp phụ chân không, một số nhà sản xuất thường bổ sung các bộ phận điều khiển khí nén như đồng hồ đo lưu lượng, công tắc phát hiện áp suất và công tắc tiệm cận vào hệ thống trong những năm gần đây.
Tuy nhiên, do hầu hết các thành phần được nhà tích hợp sửa đổi theo nhu cầu của khách hàng và điều kiện làm việc tại chỗ nên độ phức tạp của toàn bộ hệ thống thường cao.
Đồng thời, nhiều nhà sản xuất linh kiện dẫn đến công việc lắp đặt và vận hành phức tạp tại chỗ, một số trong số đó có mức tiêu thụ năng lượng cao và phụ thuộc 100% vào nguồn khí đốt.Tích hợp một phần có thể không thực hiện được
Tránh ô nhiễm tiếng ồn, nghĩa là các vấn đề không thể chấp nhận được đối với môi trường có độ chính xác cao và độ sạch cao như pin lithium và chất bán dẫn.
Nhìn chung, EVS là thiết bị truyền động chân không thông minh bằng điện thế hệ mới không cần nguồn khí nén bổ sung, điều này chắc chắn rất bắt mắt.
Lợi ích lớn nhất của hệ thống tiết kiệm không khí là dễ lắp đặt.Bởi vì điều này chắc chắn có thể làm giảm nhiều thành phần phụ trợ, bao gồm máy nén khí, bình chứa khí, thiết bị lọc không khí và đường ống đầu ra, v.v., giúp việc đi dây trở nên dễ dàng, thuận tiện và rõ ràng hơn cho khách hàng sử dụng.
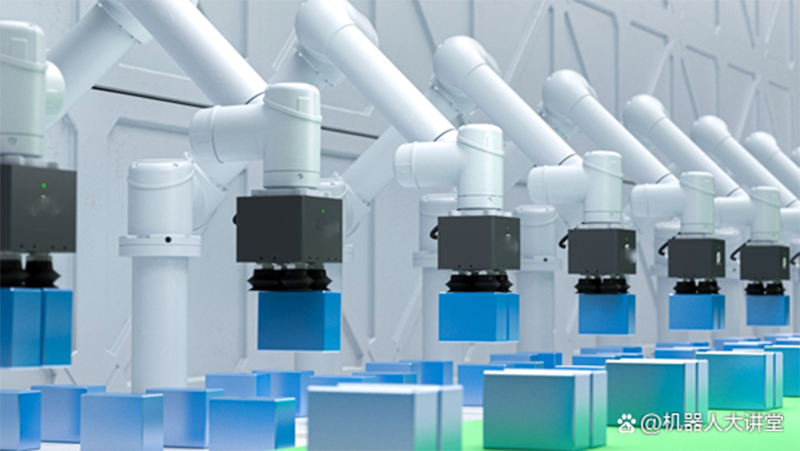
Được biết, hiện tại, nhiều bối cảnh bao gồm nền tảng robot di động, lắp ráp điện tử 3C, sản xuất pin lithium, sản xuất chất bán dẫn, hậu cần chuyển phát nhanh, v.v. có cách bố trí không gian tương đối nhỏ gọn.
Pin vuông hút EVS08
Thêm chi tiết và lợi thế
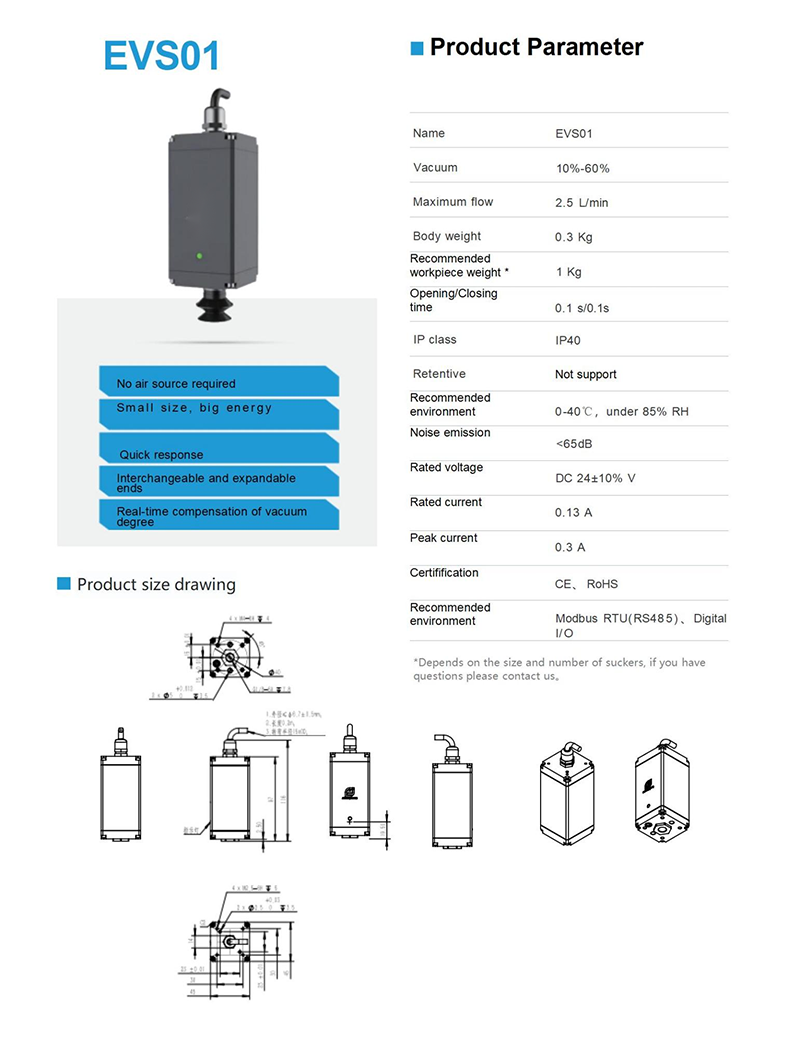
Giảng đường robot được biết rằng sản phẩm này trông rất nhỏ và chỉ nặng 2,5kg nhưng có thể đạt tới mức cao 10kg.Do thiết kế điện áp thấp 24V, mức tiêu thụ năng lượng bằng 20% so với hệ thống khí nén truyền thống, lực hấp phụ ở cuối có thể được thiết lập và điều chỉnh, lực hấp phụ có thể đạt tới 102-510N.
Về mặt thiết kế kết cấu, EVS áp dụng thiết kế kết cấu nhỏ gọn và nhẹ hơn, giúp EVS nhỏ hơn 30% so với thiết kế khí động học truyền thống cho cùng trọng lượng tải.
Đồng thời, nó có thể được kết nối trực tiếp với đầu nối ở cuối cánh tay robot, giúp giảm bớt các thành phần phụ trợ dư thừa, giúp sử dụng linh hoạt hơn, có thể triển khai nhanh chóng và có thể dễ dàng hấp thụ nhiều vật thể lớn, đặc biệt phù hợp với xếp chồng, xử lý và các hoạt động hiện trường khác.
Để nâng cao sự tiện lợi khi sử dụng, bộ truyền động chân không điện còn có giao diện tích hợp, có thể dùng để điều khiển và giám sát toàn bộ quá trình hấp phụ các vật thể.
Có thông tin cho rằng điều này là để thuận tiện cho khách hàng trong việc kiểm soát mức độ chân không của bộ truyền động chân không thông qua hướng dẫn, đồng thời kết nối thông qua liên kết IO để theo dõi và bảo trì dự đoán quá trình hấp phụ.Giám sát trạng thái sẽ giảm lỗi và thời gian ngừng hoạt động cũng như đảm bảo tính khả dụng của hệ thống.
Trên cơ sở đó, những ưu điểm, đặc điểm của EVS còn được thể hiện ở những điểm sau:
1. Cấu trúc nhỏ gọn và trọng lượng nhẹ: EVS nhỏ hơn 30% so với kích thước khí nén truyền thống khi hấp thụ cùng trọng lượng tải.Nó có thể được kết nối với đầu nối ở cuối cánh tay cơ khí để nhận biết khả năng hấp thụ tải trọng, đặc biệt thích hợp cho việc xếp chồng, xử lý và các hoạt động hiện trường khác;
2. Cấu hình thiết bị đầu cuối phong phú: Nhiều loại giác hút, túi khí và các bộ phận khác có thể được cấu hình để nhận ra khả năng bám của các vật thể khác nhau, bao gồm các bộ phận hình vuông, hình cầu và hình dạng đặc biệt;
3. Các kênh kép có thể được điều khiển độc lập: dễ dàng điều khiển bên trái và bên phải của bộ truyền động chân không, hai bên độc lập với nhau, nâng cao hơn nữa hiệu quả làm việc của dây chuyền sản xuất.Nó thực hiện đồng thời lực hút và vị trí, điều này tạo điều kiện thuận lợi rất nhiều cho việc xử lý và sắp xếp đồ vật, tiết kiệm không gian và thời gian;
4. Lực hút có thể điều chỉnh: mức độ chân không có thể được điều chỉnh theo đặc tính của sản phẩm được hút và có thể thực hiện bù chân không theo thời gian thực;
5. Phản hồi trạng thái: Nó có cảm biến phản hồi chân không, có thể phát hiện trạng thái hấp phụ của vật thể trong thời gian thực và cung cấp phản hồi và cảnh báo;
6. Bảo vệ tắt nguồn: Sau khi tắt nguồn, nó có thể thực hiện tự khóa tắt nguồn hấp phụ để bảo vệ các vật thể bị hấp phụ;
7. Khả năng thích ứng mạnh mẽ: hỗ trợ giao thức truyền thông 24V I/O và MODBUS RTU (RS485);
8. Dễ dàng cài đặt và gỡ lỗi: giao thức giao tiếp đơn giản và dễ đọc, giúp giảm đáng kể độ khó khi gỡ lỗi.Ngoài ra, phần mềm gỡ lỗi máy chủ có thể được đính kèm làm quà tặng, có thể cài đặt và chỉnh sửa để đặt các tham số chức năng ngoại tuyến.
Kết luận và tương lai
Theo xu hướng tự động hóa và trí tuệ, bộ truyền động chân không điện ngày càng trở thành bộ phận quan trọng đảm bảo hoạt động bình thường của robot và hệ thống tự động hóa, giúp việc sử dụng hệ thống truyền động điện trở nên thuận tiện và dễ sử dụng hơn, đồng thời có thể đáp ứng các tình huống đa dạng hơn như robot tổng hợp di động..
Giao diện tích hợp và cấu hình thiết bị đầu cuối phong phú cùng các hoạt động tối ưu hóa khác có thể cải thiện hơn nữa độ tin cậy của các bộ phận chính của robot, giảm tình trạng ngừng sản xuất và các vấn đề triển khai từ xa cho người dùng cuối, đồng thời giảm hơn nữa chi phí bảo trì và hậu mãi.
Thời gian đăng: 19-04-2023