Hiện nay, hầu hết các thiết bị truyền động trên thị trường đều có hai loại phương pháp điều khiển lực:
1. Kiểm soát lực vòng lặp hiện tại
Một phương pháp điều khiển lực thông thường tương đối dễ thực hiện, thực hiện điều khiển lực bằng cách điều chỉnh dòng điện bên trong của động cơ.Ưu điểm là ít khó thực hiện hơn và có thể đạt được khả năng kiểm soát lực trong phạm vi độ chính xác 5% -15%;Nhược điểm là tốc độ di chuyển chậm, không thể điều khiển ngược và không thể đáp ứng nhu cầu của một số tình huống có yêu cầu độ chính xác cao hơn.Sau một thời gian sử dụng, hao mòn cơ học sẽ gây ra sai số và làm giảm độ chính xác hơn nữa.
Những bộ truyền động như vậy thường không có cảm biến, thậm chí nếu có cảm biến thì chúng cũng chỉ được dùng để “hiển thị” lực chứ không tham gia điều khiển.Ví dụ: thêm một cảm biến vào máy ép, cảm biến sẽ đọc kích thước của lực và hiển thị giá trị thông qua đồng hồ đo, được sử dụng để hỗ trợ việc điều chỉnh thủ công kích thước của lực, nhưng việc điều chỉnh như vậy nói chung không liên quan gì với độ chính xác của lực.

Sơ đồ nguyên lý, không liên quan đến đồ họa và văn bản
2. Cảm biến điều khiển lực vòng kín
Một phương pháp điều khiển lực khác là bổ sung thêm cảm biến lực thông thường và thuật toán điều khiển vòng kín thông thường.Ưu điểm là độ chính xác được cải thiện nhưng nhược điểm là tốc độ còn chậm.Bằng cách này, độ chính xác của việc kiểm soát lực có thể tăng từ 5% lên 1%.Nếu không có thuật toán xử lý chính xác hoặc tốc độ cảm biến không đủ nhanh thì dễ bị “vượt quá”.
Thiết bị truyền động điều khiển lực
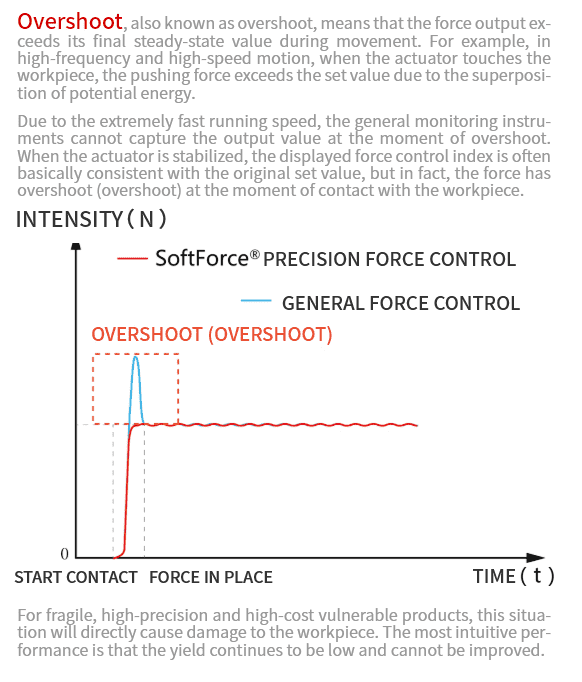
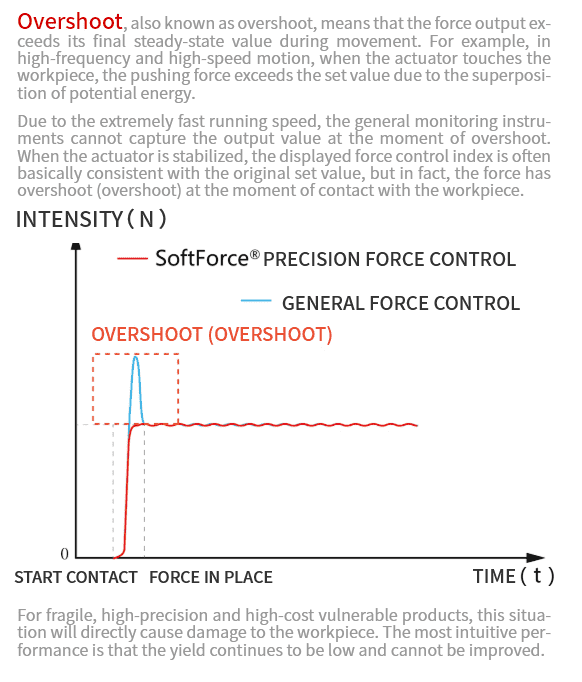
Sự “vượt quá” không thể tránh khỏi?
Phương pháp điều khiển lực vòng kín của cảm biến khó xử lý được lực tác động.Biểu hiện trực tiếp nhất là tình trạng “overshoot” rất dễ xảy ra khi xử lý những cảnh có yêu cầu nhịp độ cao.
Ví dụ
Nói chung, trong trường hợp tốc độ cao và công suất lớn, thời điểm bộ truyền động tiếp xúc với phôi thường đặc biệt lớn.Ví dụ: nếu lực đẩy của bộ truyền động được đặt thành 10N thì khi chạm vào phôi có thể dễ dàng đạt tới 11N và 12N, sau đó nó được gọi trở lại 10N thông qua thuật toán điều khiển.Những vấn đề như vậy thường xảy ra khi cảm biến lực và cái gọi là bộ truyền động điều khiển lực được thêm vào thị trường.
Đây là vấn đề tốc độ phản hồi chưa đủ nhanh.Tốc độ cao và đầu ra chính xác và ổn định bản thân nó là một cặp mâu thuẫn.Nếu có sự vọt lố (vượt quá) thì lực chính xác đặt vào là vô nghĩa.
Đặc biệt trong quy trình lắp ráp thiết bị chính xác chịu áp lực, các bộ phận dễ vỡ và giá thành cao, thường không được phép vượt quá.
Kiểm soát toàn bộ lực, tần số cao và tốc độ cao mà không bị vượt quá?
TA làm điều đó như thế nào?
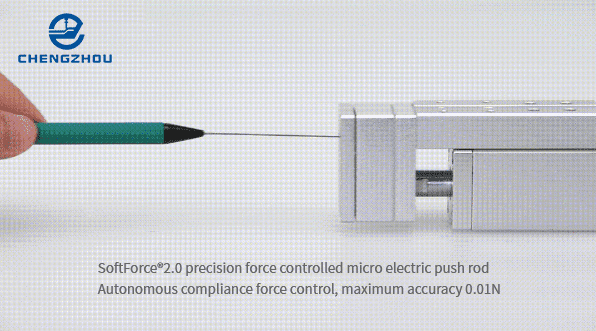
Đối với các kịch bản ứng dụng có độ chính xác cao, phương pháp “hạ cánh mềm” được áp dụng để tính đến các yêu cầu về tốc độ cao và độ chính xác cao, tức là kiểm soát lực phân đoạn.Bộ truyền động nhanh chóng tiếp cận phôi thông qua chế độ chuyển động vị trí, nhanh chóng chuyển sang chế độ điều khiển lực tại vị trí sắp tiếp xúc với phôi và tăng dần công suất ra cho đến khi đạt giá trị đặt trước.Chế độ vị trí + chế độ điều khiển lực + thời gian ổn định lực, tổng thời gian sử dụng là hiệu suất thực hiện đơn của bộ truyền động.
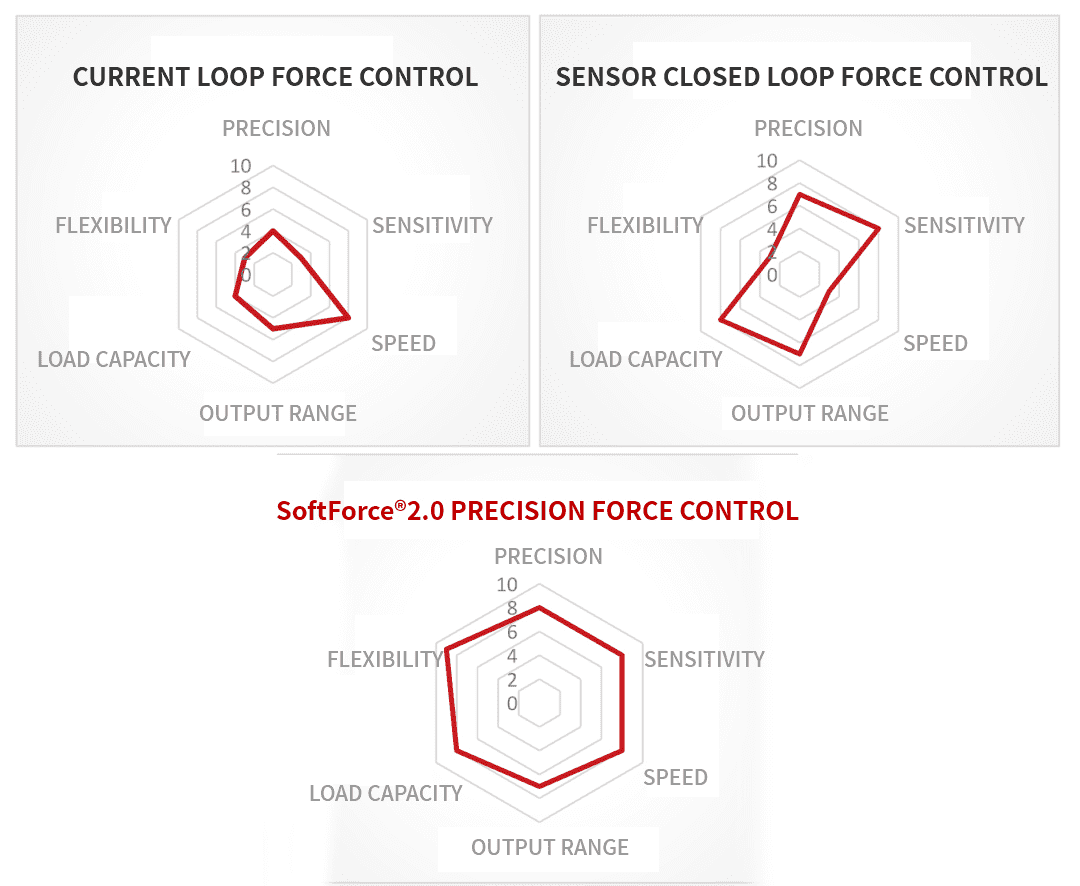
Kết hợp với cảm biến lực tốc độ cao và thuật toán điều khiển dự đoán dựa trên mô hình, bộ truyền động điều khiển lực chính xác SoftForce®2.0 có thể tự động xác định vị trí của bộ truyền động và trạng thái tiếp xúc với phôi, sao cho bộ truyền động khi kết thúc quá trình tự động hóa thiết bị, có chức năng tương tự như bàn tay con người.nhận thức xúc giác, kiểm soát và thực hiện trí thông minh.
Ở cùng một khoảng cách, phạm vi tốc độ hạ cánh mềm của “Kiểm soát lực chính xác SoftForce ®2.0” được tăng lên, dung sai lớn hơn và thậm chí nó có thể đạt được khả năng kiểm soát lực hoàn toàn, giúp cải thiện trực tiếp chu trình sản xuất và giảm đáng kể chi phí thử nghiệm và xác minh lỗi.
▋Tần số xử lý cao để đạt hiệu suất tốt hơn
Chu kỳ tính toán của sơ đồ điều khiển lực “cảm biến lực sáu trục + robot” thường được sử dụng trên thị trường là 5-10 mili giây, tức là tần số xử lý là 100-200 Hz.Tần số xử lý của các bộ truyền động điều khiển lực chính xác SoftForce®2.0 có thể đạt tới 4000Hz (tức là 0,25 mili giây) và các mẫu dòng tần số cao có thể đạt tới 8000Hz, gấp 4-8 lần tần số xử lý của các bộ truyền động điều khiển lực robot thông thường.
▋Kiểm soát lực tuân thủ chủ động, có thể theo sự thay đổi của ngoại lực
Tốc độ phản hồi hiệu quả và phản hồi lực tức thời cho phép bộ truyền động phản ứng tức thời với các lực bên ngoài và đạt được khả năng kiểm soát lực tuân thủ chủ động.Ngay cả khi gặp phải ngoại lực trong quá trình vận hành, nó vẫn có thể được điều chỉnh kịp thời, giúp quá trình diễn ra chính xác hơn.Bảo vệ phôi tốt hơn.
Tần số cao và tốc độ cao mà không bị vượt quá
Ngay cả trong chuyển động tần số cao và tốc độ cao, nó vẫn duy trì độ chính xác đầu ra cao, đồng thời đảm bảo “hạ cánh mềm” và “không vượt quá”, tiếp xúc bề mặt các bộ phận với tốc độ cao, lực nhỏ và thực hiện linh hoạt. chọn và đặt các bộ phận, v.v., để tránh làm hỏng các bộ phận mỏng manh và dễ vỡ.Các thành phần.
Kiểm soát lực chính xác SoftForce®2.0
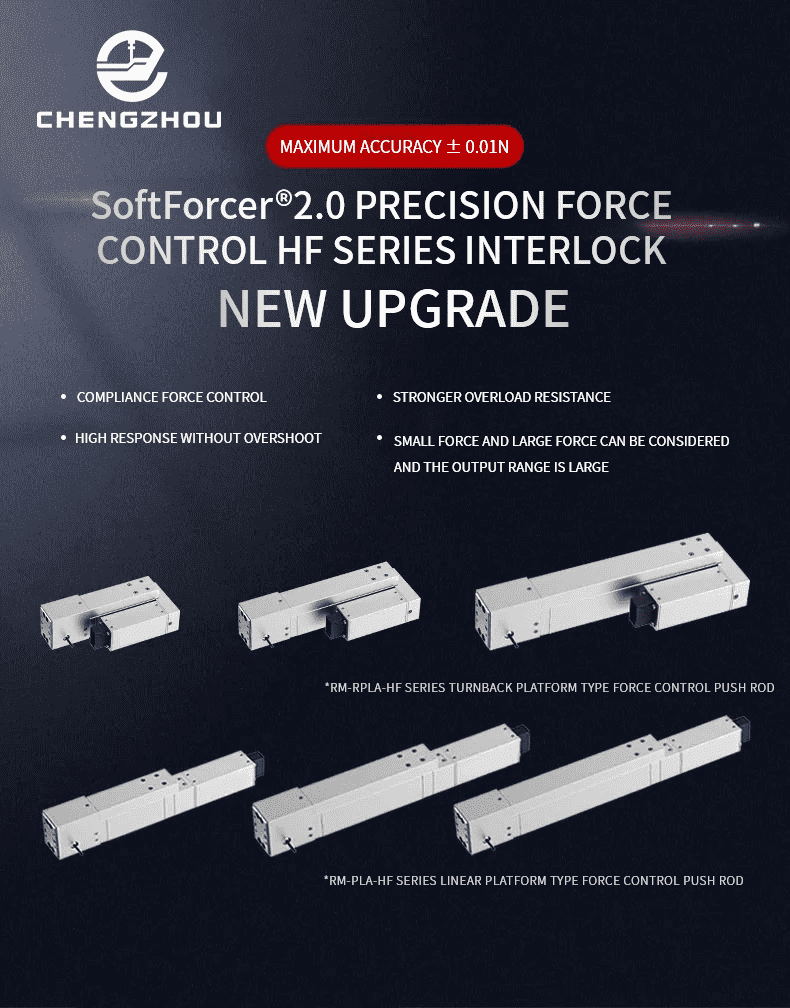
Dòng HF nâng cấp mới
▋ Khả năng chống quá tải mạnh hơn
Dựa trên sự hiểu biết sâu sắc về quy trình tại chỗ và nhiều lần lặp lại, dòng HF điều khiển lực chính xác SoftForce®2.0 mới được nâng cấp của Chengzhou vào tháng 2 năm nay có thiết kế cảm biến tích hợp và khả năng chống quá tải của nó cao hơn nhiều lần so với trong trước đây với độ bền cao hơn và dễ sử dụng hơn.Đối phó với các điều kiện phức tạp hơn.
▋Có thể tính đến cả lực nhỏ và công suất lớn
Được trang bị hệ thống điều khiển lực có độ chính xác cao SoftForce®2.0, bàn trượt và thanh đẩy được điều khiển lực chính xác với hành trình lớn và tải trọng lớn có thể tạo ra lực nhỏ và chính xác dưới tải trọng cao, đồng thời cũng có thể tính đến lực tương tự thời gian và phạm vi đầu ra rộng hơn.Lớn hơn, tức là phạm vi động lực rộng hơn*.
*Dải động lực: Tỷ lệ giữa lực tối đa và tối thiểu có thể tạo ra.
Điều khiển lực chính xác chỉ có thể được sử dụng trên một trục duy nhất
Bộ truyền động điều khiển lực chính xác SoftForce®2.0 không chỉ có thể được sử dụng trên một trục mà còn cung cấp nhiều khả năng hơn cho các giải pháp lắp ráp đa trục.Ví dụ: “Hệ thống điều khiển nền tảng điều khiển lực chính xác đồng bộ 2D RM Chengzhou” mới nhất do Chengzhou Technology ra mắt bao gồm hai bộ truyền động điện điều khiển lực chính xác Chengzhou, có thể thay thế lực của sơ đồ điều khiển “cảm biến sáu trục + robot”, được sử dụng để mài và mài chính xác khung bên trong của điện thoại di động, v.v.
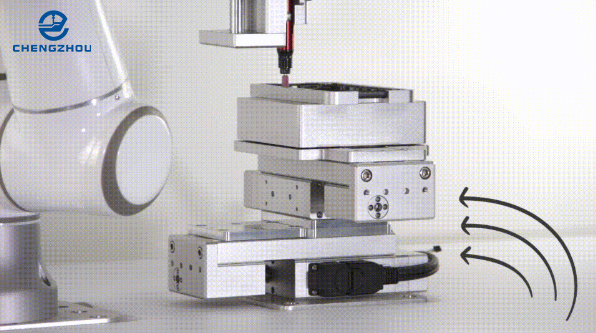
Hệ thống điều khiển nền tảng điều khiển lực chính xác đồng bộ Chengzhou 2D
(Được trang bị hệ thống kiểm soát lực có độ chính xác cao SoftForce®2.0)
Dịch vụ chuyên nghiệp tinh tế và dễ sử dụng
Thuật toán điều khiển nâng cao và quy trình gỡ lỗi đơn giản mang lại trải nghiệm người dùng thuận tiện cho khách hàng.Ngay cả một nhà điều hành có trình độ thấp cũng có thể bắt đầu sau 5 phút, đúng nghĩa là “cắm và chạy”.
Đồng thời, đội ngũ dịch vụ kỹ thuật sau bán hàng chuyên nghiệp và mạnh mẽ của Chengzhou Technology có thể cung cấp cho khách hàng hỗ trợ kỹ thuật kịp thời, toàn diện và không phải lo lắng ngay lần đầu tiên, cho dù đó là nghi ngờ về kỹ thuật, giảng dạy, khắc phục sự cố hay bảo trì.
Chengzhou Technology luôn đủ dũng cảm để mở rộng ranh giới của mình.Với sức mạnh kỹ thuật vững chắc và sáng tạo, công ty đã liên tục tung ra các sản phẩm thiết bị truyền động chất lượng cao thông minh hơn, chính xác hơn và tương thích hơn để cung cấp các sản phẩm tiên tiến cho việc đóng gói và thử nghiệm chất bán dẫn, tự động hóa 3C, sản xuất chính xác, y tế thông minh và các ngành công nghiệp khác.các thành phần cốt lõi như hệ thống điều khiển chuyển động chính xác và bộ truyền động.
Thời gian đăng: 31-05-2022